-
Graph
그래프는 트리와 마찬가지로 비 선형적 자료구조로
node와 노드를 잇는 link의 집합으로 구성된다.
트리와 가장 큰 차이점은 그래프의 노드는 어떠한 패턴으로 연결되도 상관 없다는 것이다.
(심지어 비어있거나, 연결이 아예 안된 노드도 존재할 수 있음)
노드의 구현과 탐색에 앞서 노드의 용어부터 정리하고 가자.

<Fig. 01: Undirected / Directed graph> Path: vertex들의 순서나열.
e.g. path of v0 to v2: e0 e1 / e0 e2 e3 e5 / e4 e5 / e4 e3 e2 e1
Cycle: 출발 vertex = 도착 vertex인 path
Multiple edges: 같은 두 vertex 사이 2개 이상의 edge가 연결된 것.
Simple Graph: loop, multiple edges가 없는 graph

<Fig. 02: example graph> 위 그래프를 나타내는 노드의 구현은 크게 세 가지 방법이 존재한다.
1. Adjacency Matrix

<Fig. 03: adjacency matrix implement <Fig. 02>> cell[i][j]는 vertex i에서 j로의 연결을 표현하고, T는 연결되어 있음을 의미한다.
T 대신 숫자가 들어간 경우 해당 연결 사이의 weight을 나타낸다.
2. Adjacency List

<Fig. 04: adjacency list implement <Fig. 02>> cell[i]는 vertex i에 직접적으로 연결되어 있는 vertex들이 linked list형태로 저장되어 있다.
3. Edge Set

<Fig. 05: edge set implement <Fig. 02>> cell[i]는 vertex i에 직접적으로 연결되어 있는 vertex들이 set형태로 저장되어 있다.
이 포스트에서는 비교적 간단한 Adjacency Matrix를 이용한 graph를 구현해볼 것이다.
template <class Item> class graph { public: … static const std::size_t MAX = 20; private: bool edges[MAX][MAX]; Item labels[MAX]; std::size_t many_vertices; }template <class Item> Item &graph<Item>::operator[](std::size_t vertex) { assert(vertex < size()); return labels[vertex]; }일단 인덱스에 접근하기 위해 operator overloading을 구현해준다.
template <class Item> void graph<Item>::add_vertex (const Item &label) { std::size_t new_vertex_number; std::size_t vertex; assert(size() < MAX); new_vertex_number = many_vertices; ++many_vertices; for (vertex = 0; vertex < many_vertices; ++vertex) { edges[vertex][new_vertex_number] = false; edges[new_vertex_number][vertex] = false; } labels[new_vertex_number] = label; }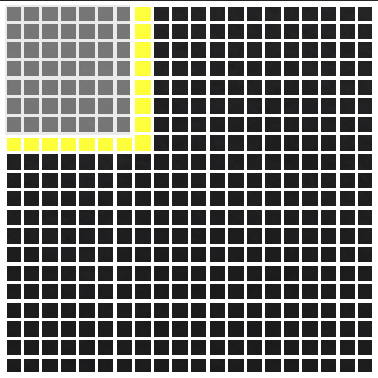
<Fig. 06: add_vertex> vertex를 추가하는 함수.
lables에 값을 넣어주고, edges를 false로 초기화한다.
template <class Item> void graph<Item>::add_edge(std::size_t source, std::size_t target) { assert(source < size()); assert(target < size()); edges[source][target] = true; } template <class Item> void graph<Item>::remove_edge(std::size_t source, std::size_t target) { assert(source < size()); assert(target < size()); edges[source][target] = false; } template <class Item> bool graph<Item>::is_edge(std::size_t source, std::size_t target) const { assert(source < size()); assert(target < size()); return edges[source][target]; }edge의 setter, getter 함수.
template <class Item> std::set<std::size_t> graph<Item>::neighbors(std::size_t vertex) const { std::set<std::size_t> answer; std::size_t i; assert(vertex < size()); for (i = 0; i < size(); ++i) { if(edges[vertex][i]) answer.insert(i); } return answer; }vertex에 연결되어있는 vertex의 집합을 리턴하는 함수.
Graph Traversal
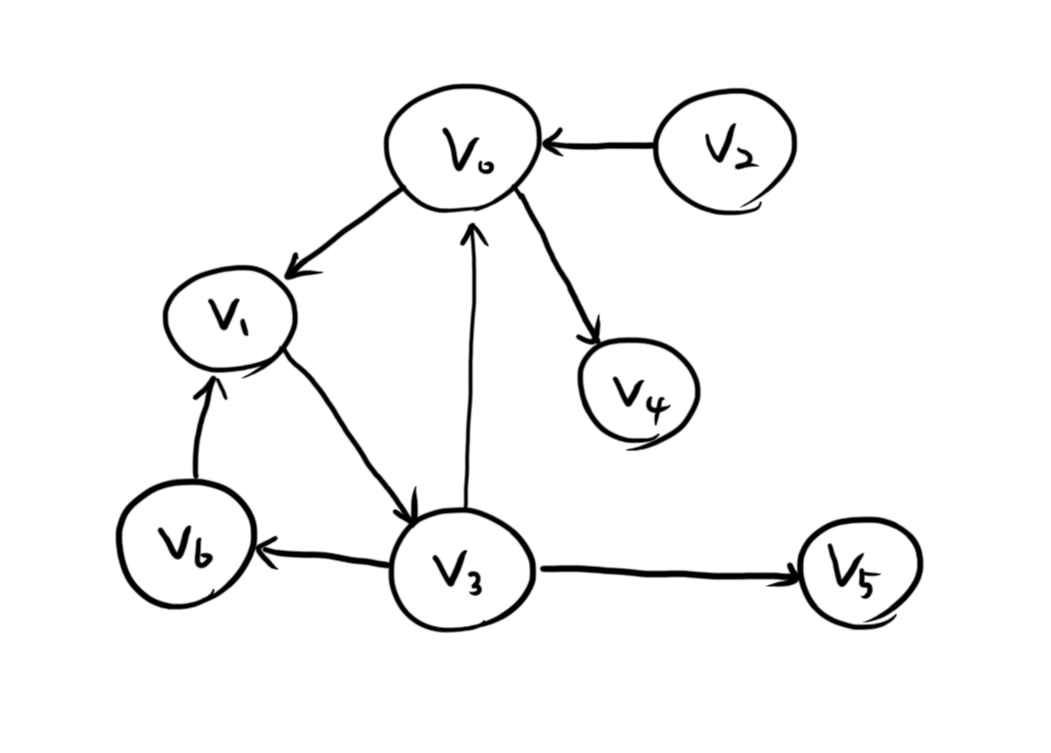
<Fig. 07: example graph> 그래프를 탐색하는 방법은 크게 두 가지 방법이 있다.
1. Depth-first Search
재귀방식으로 탐색하는 방법으로 하나의 이웃을 우선 깊게 탐색하는 방법이다.
template <class Process, class Item, class SizeType> void depth_first (Process f, graph<Item> &g, SizeType start) { bool marked[g.MAX]; assert(start < g.size()); std::fill_n(marked, g.size(), false); rec_dfs(f, g, start, marked); } template <class Process, class Item, class SizeType> void rec_dfs(Process f, graph<Item> &g, SizeType v, bool marked[]) { std::set<std::size_t> connections = g.neighbors(v); std::set<std::size_t>::iterator it; marked[v] = true; f(g[v]); // traversal for (it = connections.begin(); it != connections.end(); ++it) { if (!marked[*it]) rec_dfs(f, g, *it, marked); } }위 코드를 통해 Depth-first Search를 구현할 경우 아래와 같이 모든 vertex를 탐색하게 된다.
<Fig. 07>: v0 v1 v3 v5 v6 v4
2. Breadth-first Search
queue를 활용한 탐색 방법으로 여러 이웃을 골고루 탐색하는 방법이다.
template <class Process, class Item, class SizeType> void breadth_first (Process f, graph<Item> &g, SizeType start) { bool marked[g.MAX]; std::set<std::size_t> connections; std::set<std::size_t>::iterator it; std::queue<std::size_t> vertex_queue; assert(start < g.size()); std::fill_n(marked, g.size(), false); marked[start] = true; f(g[start]); // traversal vertex_queue.push(start); do { connections = g.neighbors(vertex_queue.front()); vertex_queue.pop(); for (it = connections.begin(); it != connections.end(); ++it) { if (!marked[*it]) { marked[*it] = true; f(g[*it]); // traversal vertex_queue.push(*it); } } } while (!vertex_queue.empty()); }위 코드를 통해 Breadth-first Search를 구현할 경우 아래와 같이 모든 vertex를 탐색하게 된다.
<Fig. 07>: v0 v1 v4 v3 v5 v6
Path Arlgorithm
위에서 본 DFS, BFS의 방식은 vertex u, v 사이가 연결되어있는가를 확인하는 알고리즘이다.
v에 한 번이라도 방문했다면, u-v는 연결되어있다는 뜻이다.
하지만 vertex사이 edge에 weight가 있고, 두 vertex사이에 최소거리,
즉 weight의 합이 최소가 되는 경로를 찾는 방법은 무엇일까?
start vertex에서 연결된 모든 vertex의 최소거리를 구하는 대표적인 알고리즘에는 Dijkstra Algorithm이 있다.
pseudo code의 일부를 살펴보자.
for (v = 0; v < n; v++) { if ((v is not in allowed_vertex) && (there is an edge from next to v)) { sum = distance[next] + weight(next, v) if (sum < distance[v]) { distance[v] = sum predecessor[v] = next } } }하나의 vertex에서 next vertex 사이의 거리를 계산하는데,
새로 계산된 거리가 기존에 저장된 거리보다 짧을 경우 갱신하는 과정으로 구현된다.
이 때, predecessor에 최소거리가 되는 vertex사이의 관계를 저장 및 갱신하는데,
특정 vertex에서 start vertex까지의 최단경로가 되게 하는 vertex의 연결 관계를 출력하려면 다음과 같이 하면 된다.
vertex = v; cout << vertex << endl; while (vertex != start) { vertex = predecessor[vertex]; cout << vertex << endl; }이렇게하면 역순으로 vertex의 연결관계를 출력할 수 있다.
정순으로 출력하려면 출력대신 stack에 넣어주고, 마지막에 stack이 빌 때 까지 출력하며 pop하면 될 것이다.
'대학 > 자료구조' 카테고리의 다른 글
Searching (0) 2022.12.05 Tree - Heap, B-Tree (2) 2022.12.05 Tree - Binary Search Tree (0) 2022.12.04 Tree (0) 2022.12.04 Recursive Function (0) 2022.12.04